
第十二章:从“单打独斗”到“群体智能”:手把手教你用ROS2+PX4实现分布式无人机编队飞行
朋友们,前面我们花了不少篇幅,聊的都是怎么让“一架”无人机变得聪明起来:自主飞行、视觉追踪、精准降落……这些都解决了“单体智能”的问题。
但现实世界的很多任务,比如大面积搜救、协同物流、动态灯光秀,单机的能力是有限的。这时,我们就需要让无人机“组团”干活,像一个整体一样运动——这就是多机编队飞行。
今天,我们不谈空中表演那种“花架子”,而是要深入技术内核,聊聊如何用ROS2和PX4,实现一个真正可扩展、高鲁棒性的分布式编队系统。这标志着我们的无人机,正式从“单打独斗”迈入“群体智能”的新阶段。
核心差异:集中指挥 vs. 民主协商
多机系统的核心,首先不是“怎么飞”,而是“谁来指挥”。这里有两种根本不同的哲学:
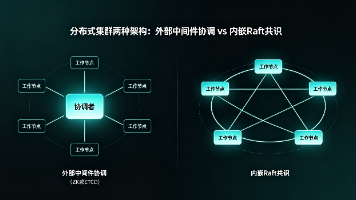
1.集中式指挥:有一个“总司令”(中心控制器)。所有无人机实时向它汇报位置,它计算好每架飞机的指令再分发下去。
优点:规划简单,全局视野。
缺点:“总司令”一旦挂掉,全军覆没;飞机越多,通信和计算压力越大,难以扩展。
2.分布式协同:没有“总司令”。每架飞机只和身边有限的“邻居”沟通(比如前后左右的飞机),再结合一个共同的“虚拟目标”(虚拟领航者),自己决定怎么飞。
优点:没有单点故障,局部失效不影响整体;新增飞机很容易加入;通信负担轻。
挑战:设计更复杂,需要数学证明这种“局部民主”最终能达成“全局一致”。
显然,分布式才是大规模、高可靠无人机集群的未来。我们本章要实现的,正是这种架构。
数学建模:用图论描述“谁和谁说话”
要实现分布式协同,首先要数学化描述无人机之间的通信关系。这里,图论 是我们的语言。
通信拓扑图:每架无人机是一个“节点”,如果无人机i能收到无人机j的信息,就画一条从j指向i的边。
邻接矩阵A:用矩阵来精确表示这个“谁认识谁”的关系。如果j是i的邻居,则A[i][j]=1,否则为0。
拉普拉斯矩阵L:L = D - A,其中D是度矩阵。这个L矩阵是整个一致性控制理论的核心,它的特征值性质直接决定了系统能否收敛。
控制律:让局部互动涌现整体队形
我们的目标是让无人机保持一个固定队形(比如菱形),并且整体能跟着一个虚拟领航者运动。这需要为每架飞机i设计一个控制律:
u_i = v_0 - k * Σ( a_ij * (p_i - p_j) ) - g_i * (p_i - p_0)
别怕,我们拆开看:
v_0:前馈项。直接跟踪虚拟领航者的速度,让编队能整体运动。
-k * Σ(...):一致性项。这是分布式的精髓。飞机i会比较自己和所有邻居j的位置差,并朝缩小这个差的方向调整。系数k是控制增益。
-g_i * (p_i - p_0):牵引项。这是引入虚拟领航者的关键。只有部分被“锚定”的飞机(g_i > 0)能直接知道领航者的位置p_0,它们会努力向领航者靠拢,并通过邻居间的“一致性”作用,把整个编队都“拉”过去。
理论保证:只要通信拓扑是连通的(信息能传到每架飞机),并且至少有一架飞机被“锚定”(g_i > 0),那么整个系统就能指数收敛到期望队形,并跟随领航者。这从数学上证明了“局部民主”能实现“全局一致”。
工程实现:ROS2+PX4的架构设计
理论很美,但如何落地?我们基于 ROS2 + PX4 Offboard模式 来搭建。
核心架构:
1.一机一节点:每架无人机运行一个独立的ROS2节点,通过命名空间(如/px4_1/, /px4_2/)进行隔离,订阅和发布各自的话题。
2.虚拟领航者:一个独立的节点发布领航者的位姿和速度(例如话题/virtual_leader/odometry)。
3.分布式控制节点:每个飞机的节点,按照上述控制律,只订阅:
其邻居节点的/px4_j/fmu/out/vehicle_odometry。
(如果被锚定)虚拟领航者的话题。然后,它计算出本机的期望速度u_i,通过/px4_i/fmu/in/trajectory_setpoint话题,以velocity控制模式发送给本机的PX4飞控。
4.通信可靠性:与PX4的所有通信,必须使用BEST_EFFORT和VOLATILE的QoS策略,以匹配PX4默认的Fast-DDS配置,避免在高频控制下阻塞。
关键细节:
心跳机制:每个节点需要后台线程持续发布OffboardControlMode心跳消息,维持Offboard模式。
不负责起飞:我们的编队控制程序假设所有无人机已由其他程序(如地面站)统一解锁并起飞至悬停点,它只专注于队形保持与协同运动逻辑。
AI辅助编程的关键:提示词即设计文档
在实现这样一个五机编队的复杂系统时,如果我们借助AI辅助编程,提示词(Prompt)的精度直接决定了代码的可用性。它不再是一个简单的请求,而是一份必须毫厘不差的工程设计说明书。
你的提示词必须明确包括:
1.系统规模与拓扑:明确写出5x5的邻接矩阵A和牵引向量b的具体值,AI不会猜。
2.数学控制律:必须给出上面那个完整的公式,而不能只说“保持队形”。
3.节点与接口规则:明确命名空间规则(/px4_i/)、虚拟领航者话题、以及每个节点只能订阅其邻居和(若被锚定)领航者。
4.PX4接口约束:明确控制模式为velocity,在TrajectorySetpoint消息中只设置velocity字段,position设为NaN。
5.QoS策略:必须写明使用BEST_EFFORT和VOLATILE。
缺失任何一点,AI生成的代码都可能无法运行,或违背“分布式”的初衷(例如退化为全局广播)。在复杂系统开发中,精确描述问题的能力,正变得和动手编码的能力同等重要。
总结
从单机自主到多机协同,我们完成了三个跃迁:
1.从单体控制到群体协同。
2.从局部稳定性到全局收敛性。
3.从单节点编程到分布式系统架构设计。
我们基于图论和一致性理论,设计了带虚拟领航者的分布式控制律,并利用ROS2的分布式计算特性和PX4的稳定飞控,搭建了一个可扩展的工程框架。这为无人机集群执行更复杂的协同任务(如包围、覆盖、搜索)奠定了坚实的技术基础。
群体智能的序幕,就此拉开。
更多推荐
 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)