
基于Matlab/Simulink的分布式四轮驱动整车控制仿真模型:探索动力世界的宝藏
基于matlab/simulink分布式四轮驱动整车控制仿真模型,其中包括轮毂电机扭矩分配控制策略模型、驾驶员模型、轮毂电机模型、动力电池模型、变速箱模型、整车动力学模型等——[1]可进行动力性经济性仿真,纯手工搭建,含金量较高——[2]提供仿真参数,可直接运行仿真出结果——[3]可任意改变策略,扭矩分配系数,或加扭矩分配优化算法,可直接出论文在汽车技术飞速发展的今天,分布式四轮驱动技术以其独特的
基于matlab/simulink分布式四轮驱动整车控制仿真模型,其中包括轮毂电机扭矩分配控制策略模型、驾驶员模型、轮毂电机模型、动力电池模型、变速箱模型、整车动力学模型等 ——[1]可进行动力性经济性仿真,纯手工搭建,含金量较高 ——[2]提供仿真参数,可直接运行仿真出结果 ——[3]可任意改变策略,扭矩分配系数,或加扭矩分配优化算法,可直接出论文
在汽车技术飞速发展的今天,分布式四轮驱动技术以其独特的优势逐渐崭露头角。而借助Matlab/Simulink搭建的分布式四轮驱动整车控制仿真模型,更是为汽车领域的研究人员和工程师们提供了一个强大的探索平台。今天就来给大家深入介绍一下这个含金量颇高的仿真模型。
模型构成的奇妙拼图
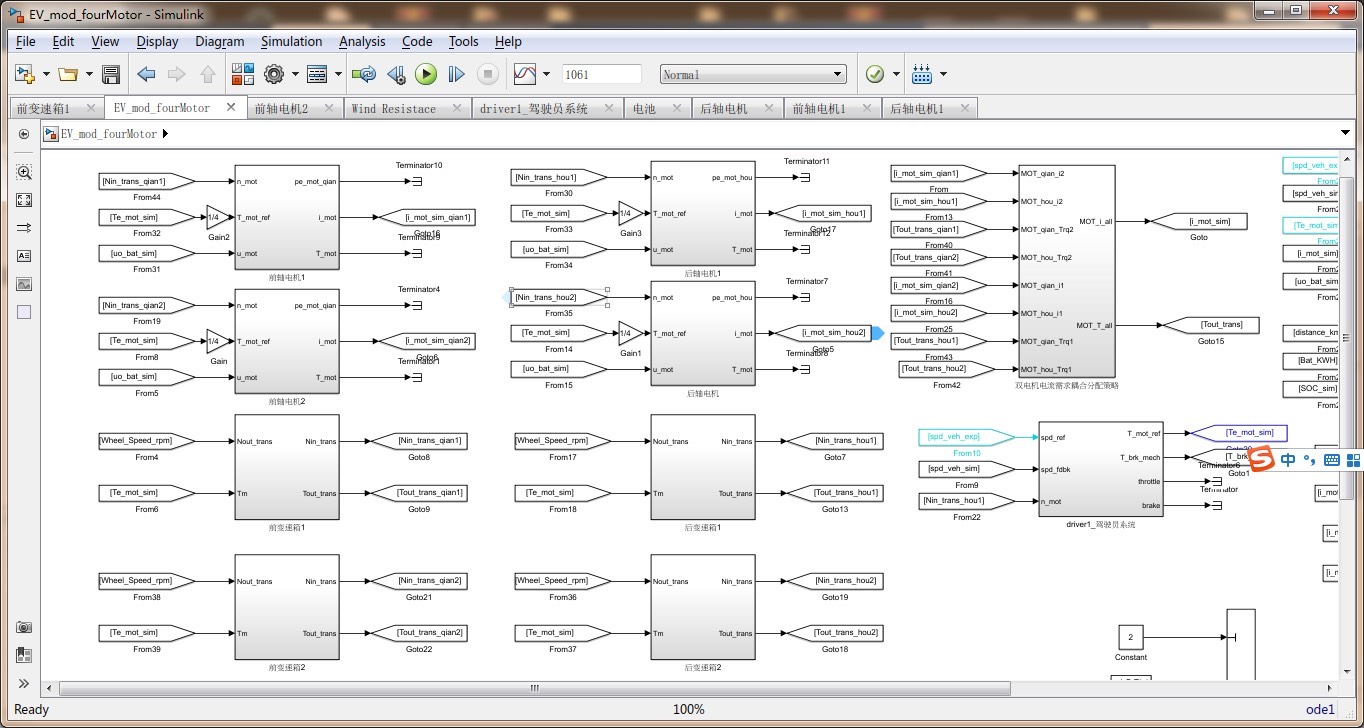
这个仿真模型犹如一个精密的拼图,由多个关键部分构成。
- 轮毂电机扭矩分配控制策略模型:它就像是整车动力分配的指挥官。在实际驾驶过程中,不同的路况和驾驶需求需要对每个轮毂电机的扭矩进行精准分配。比如在转向时,外侧车轮需要更大的扭矩来维持车辆的转向半径和稳定性。以下是一个简单示意的伪代码(非Matlab实际代码语法)来展示扭矩分配逻辑:
if (steering_angle > 0) {
torque_front_right = base_torque * (1 + steering_bias);
torque_front_left = base_torque * (1 - steering_bias);
// 后车轮类似逻辑
} else {
torque_front_right = base_torque;
torque_front_left = base_torque;
}这里,steeringangle表示方向盘转角,basetorque是基础扭矩,steering_bias是根据转向程度调整扭矩分配的系数。通过这样的逻辑,车辆在转向时能够实现合理的扭矩分配,保证行驶稳定性。
- 驾驶员模型:模拟真实驾驶员的操作行为,比如加速踏板的踩踏、制动踏板的操作以及方向盘的转动等。这个模型将驾驶员的意图转化为车辆可执行的控制信号,是连接人与虚拟车辆的桥梁。
- 轮毂电机模型:轮毂电机直接安装在车轮内,为车辆提供动力。它的特性模拟非常关键,包括电机的扭矩 - 转速特性、效率曲线等。Matlab中可以通过一些传递函数或者查表的方式来精确模拟电机的实际运行情况。例如,根据电机的额定参数,可以设定电机在不同转速下输出扭矩的计算公式:
function torque = hub_motor_torque(speed)
rated_speed = 1000; % 额定转速
rated_torque = 50; % 额定扭矩
if speed <= rated_speed
torque = rated_torque * speed / rated_speed;
else
torque = rated_torque * (1 - (speed - rated_speed) / (2 * rated_speed));
end
end这段代码简单地展示了一个根据转速计算轮毂电机扭矩的函数,实际应用中会更加复杂,需要考虑电机的更多特性。
- 动力电池模型:模拟电池的充放电过程、电压变化、内阻特性等。电池的性能直接影响车辆的续航里程和动力输出。在Simulink中,可以使用等效电路模型来构建动力电池模型,通过设定不同的参数来模拟不同类型电池的特性。
- 变速箱模型:尽管分布式四轮驱动车辆可能不需要传统意义上复杂的变速箱,但仍然可以通过变速箱模型来模拟一些传动比的变化,优化电机的工作点,提高车辆的效率。例如,在车辆起步时采用较大的传动比,提供较大的扭矩;在高速行驶时采用较小的传动比,降低电机转速,提高效率。
- 整车动力学模型:整合各个部件的作用,模拟车辆在不同工况下的实际运动,包括纵向、侧向和垂向的动力学特性。它考虑了车辆的质量、惯性、轮胎与地面的附着力等因素,是整个仿真模型的核心,真正将各个部件连接成一个有机的整体,使虚拟车辆能够像真实车辆一样行驶。
模型的强大功能
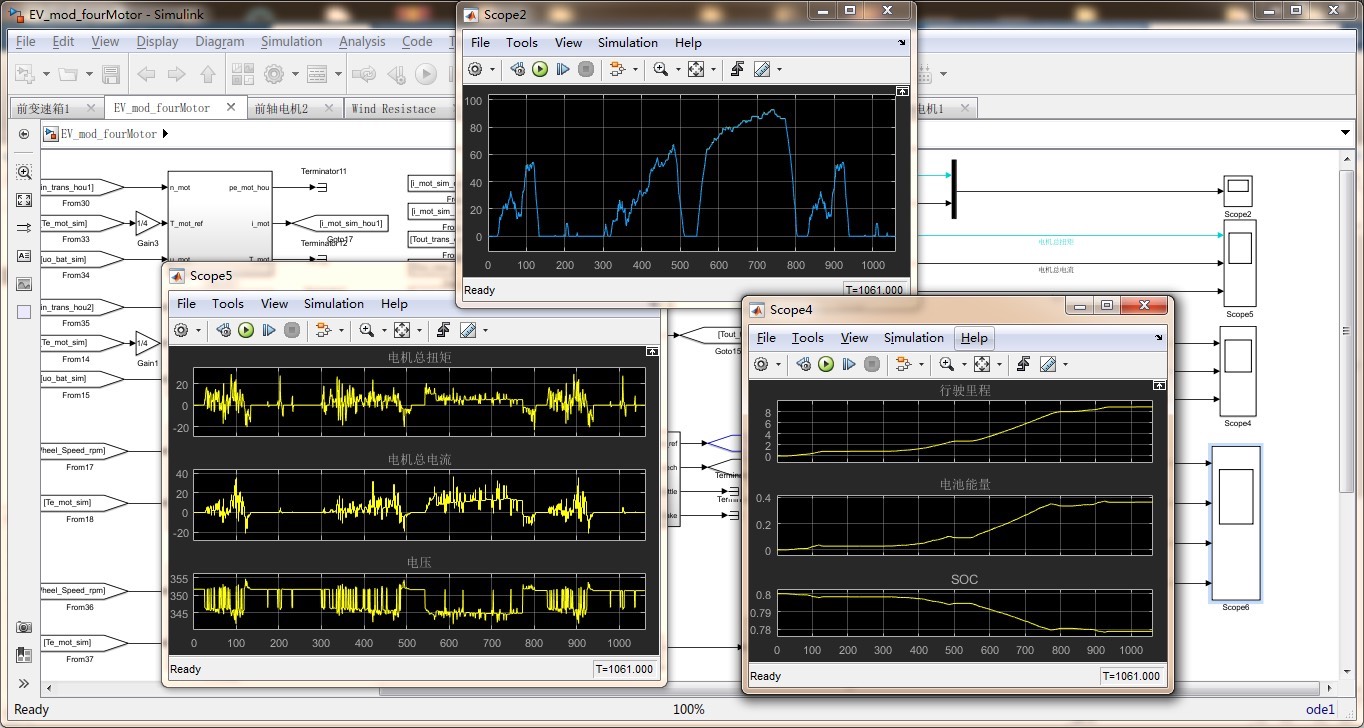
动力性经济性仿真:纯手工搭建的价值
这个模型可进行动力性经济性仿真,而且是纯手工搭建。纯手工搭建意味着对每个模型细节的深入理解和精准把控。与一些自动化生成的模型不同,纯手工搭建可以根据具体的研究需求对每个部件进行细致的调整和优化。例如,在研究车辆的加速性能时,可以精确调整轮毂电机的扭矩输出曲线,观察整车动力性能的变化;在研究经济性时,可以调整动力电池的充放电策略,分析不同策略下车辆的能耗情况。这种高度定制化的能力,使得研究结果更具针对性和可靠性,这也是该模型含金量较高的重要原因之一。
便捷的仿真参数与结果获取
提供仿真参数,这简直是一大福音。无论是新手研究人员想要快速上手,还是经验丰富的工程师想要验证新的想法,都可以直接利用这些参数运行仿真出结果。你无需花费大量时间去摸索如何设置复杂的初始条件和参数,大大节省了时间和精力。就像拿到了一把直接开启仿真大门的钥匙,快速进入到研究的核心环节。
科研利器:助力论文产出
这个模型还有一个超厉害的地方,就是可任意改变策略,扭矩分配系数,或加扭矩分配优化算法,然后可直接出论文。想象一下,你有一个关于提高车辆稳定性的新扭矩分配策略想法,只需要在模型中简单调整相关参数或者添加自己设计的优化算法模块。运行仿真后,就能得到一系列的数据来支持你的理论。从策略的提出,到仿真验证,再到论文撰写,整个流程一气呵成。例如,你可以尝试一种基于模糊逻辑的扭矩分配优化算法,通过调整隶属度函数和模糊规则,观察车辆在不同工况下的性能提升,将这些数据和分析整理后,就是一篇有价值的科研论文。
基于Matlab/Simulink的分布式四轮驱动整车控制仿真模型,无论是对于汽车技术的研究创新,还是科研论文的撰写,都具有极高的价值。它就像一个充满无限可能的虚拟实验室,等待着更多的探索者去挖掘其中的宝藏。希望更多的朋友能够利用这个模型,在汽车领域的研究中取得新的突破。
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)