
人形机器人_双足行走动力学:三元件模型及其在肌腱特性模拟的应用
摘要:三元件模型是粘弹性力学中模拟材料复杂力学行为的重要工具,主要包括标准线性固体模型(SLS)和广义Kelvin模型,分别用于应力松弛和蠕变分析。SLS模型通过弹簧与Maxwell单元并联描述瞬时弹性和长期松弛,而广义Kelvin模型通过弹簧与Kelvin-Voigt单元串联表征多阶段延迟弹性。该模型在肌腱力学模拟、生物材料设计和柔性机器人等领域有广泛应用。但线性假设限制了其对非线性行为的精确描
一、三元件模型的内容与结构
三元件模型是粘弹性力学中的经典模型,通过弹簧(弹性元件)和阻尼器(粘性元件)的组合,模拟材料的弹性、延迟弹性及粘性流动特性。最常见的三元件模型包括标准线性固体模型(弹簧与Maxwell模型并联)和广义Kelvin模型(弹簧与Kelvin-Voigt模型串联),其核心目标是更全面地描述材料在动态载荷下的复杂力学行为(如应力松弛、蠕变、频率依赖性等)。
(一)标准线性固体模型(SLS模型)
1.结构组成
弹簧(k1)模型与Maxwell模型(k2+c)并联:Maxwell模型由弹簧 k2 和阻尼器 c 串联构成。总应力由并联的两部分共同承担,适用于模拟材料的瞬时弹性响应与长期应力松弛行为。
2.力学方程

3.典型响应特性
应力松弛:恒定应变下,应力随时间衰减至非零稳态值(σ_∞=k1ε)。
蠕变:恒定应力下,应变随时间逐渐增加并趋于稳态(ε_∞=σ/k_1)。
动态响应:储能模量(G′)和损耗模量(G′′)随频率变化,能反映材料的频率依赖性。
4.应用场景
肌腱应力松弛模拟,预测术后缝合线的张力衰减过程;高分子材料蠕变,例如用于分析预测聚氨酯支架的长期形变。
(二)广义Kelvin模型(Generalized Kelvin Model)
1.结构组成
弹簧(k1)与Kelvin-Voigt单元(k2+c)串联。Kelvin-Voigt单元由弹簧 k2 和阻尼器 c 并联构成。总应变为串联两部分应变之和,适用于描述多阶段延迟弹性行为。
2.力学方程

3.典型响应特性
蠕变:应变随时间逐渐增加并分阶段趋于稳态(初始弹性变形 + 延迟弹性变形)。
应力松弛:在固定应变下,应力逐渐降低至零(需结合其他元件扩展)。
动态响应:适用于低频振动下的能量耗散分析。
4.应用场景
肌腱蠕变行为建模:模拟长期拉伸下的胶原纤维重组过程。
软体机器人驱动设计:优化气动人工肌肉的延迟弹性响应。
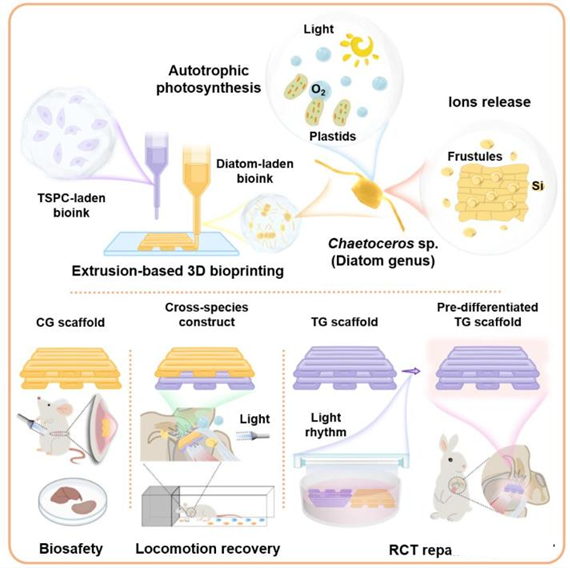
3D生物打印载角毛藻和肌腱干-祖细胞生物墨水以构建跨物种共生支架
(三)其他变种分类
1. Burgers模型(四元件模型)
Maxwell模型与Kelvin-Voigt模型串联。同时描述蠕变和应力松弛,但参数较多(k1,c1,k2,c2),适用于复杂流变材料(如沥青、生物软组织)。方程:

2. 分数阶三元件模型
引入分数阶导数(如Caputo导数)替代整数阶导数,描述非均匀粘弹性。方程示例:
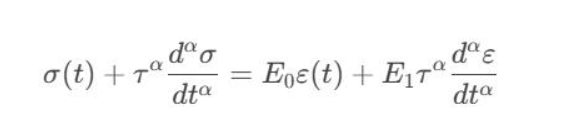
其中 α∈(0,1)α∈(0,1) 为分数阶阶数,ττ 为松弛时间。用于精准模拟肌腱高频振动下的共振特性。
(四)三元件模型的优势与局限性

三元件模型的优势与局限性
(五)改进方向与发展趋势
1.智能材料集成
磁流变弹性体:通过磁场实时调节阻尼系数 cc,适配动态载荷(响应时间 <10 ms)。
形状记忆聚合物(SMP):利用温度触发刚度 kk 变化,模拟肌腱的应变硬化行为。
2.多尺度建模
结合分子动力学(微观胶原纤维)与连续介质力学(宏观组织),构建跨尺度本构方程。
3.数据驱动优化
利用机器学习(如神经网络)从实验数据中自动提取模型参数,减少标定成本。
案例:基于深度学习的参数反演算法,将肌腱应力松弛数据拟合误差降低至5%以内。
4.生物融合设计
开发“生物-合成”混合材料,如3D打印水凝胶支架,其力学性能通过三元件模型编程控制,实现与天然肌腱的力学匹配。
(六)总结
三元件模型通过弹性与粘性元件的灵活组合,为复杂粘弹性行为提供了可量化的分析框架。标准线性固体模型和广义Kelvin模型是两类核心结构,分别适用于稳态应力分析和多阶段蠕变建模。未来,通过分数阶扩展、智能材料集成及AI驱动优化,三元件模型将在生物力学修复、柔性机器人等领域实现更高精度的动态响应预测与主动调控。
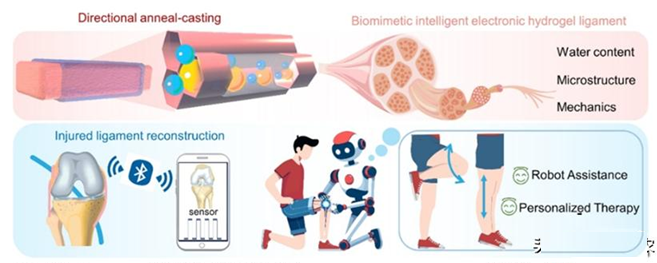
全仿生智能水凝胶韧带
二、三元件模型在拟合肌腱特性中的应用
(一)三元件模型在肌腱特性拟合中的应用现状
- 肌腱的粘弹性行为模拟
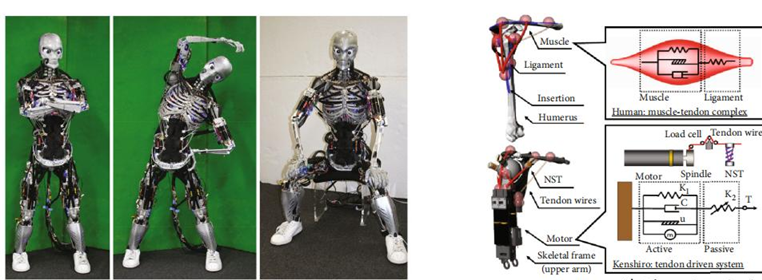
肌腱在动态载荷下表现出非线性粘弹性,例如应力松弛(恒定应变下应力衰减)和蠕变(恒定应力下应变增加)。三元件模型通过弹性储能和粘性耗散的组合,可量化肌腱的瞬时弹性响应(如胶原纤维拉伸)与长期松弛行为(如基质流动)。例如,在肩袖撕裂修复研究中,三元件模型被用于预测合成支架的力学性能,优化其与天然肌腱的力学匹配。 - 手术修复与康复评估
结合临床数据,三元件模型可模拟术后肌腱的愈合过程。例如,通过调整模型参数(刚度 k1,k1,k2 和阻尼 c),预测缝合线张力随时间的变化,指导手术方案选择(如双排缝合技术)。此外,在智能水凝胶韧带的设计中,模型被用于优化材料的力学梯度,使其与天然韧带的应力-应变曲线匹配。 - 动态运动分析
在运动医学中,三元件模型用于分析肌腱在高频冲击(如跑步)或低频持续载荷(如静态拉伸)下的能量传递效率。例如,研究显示,三元件模型可量化踝关节跟腱在推进相的能量回馈效率(约60-70%)。
肌腱组织工程发展趋势
(二)三元件模型的优势
- 多尺度行为捕捉
通过弹性与粘性元件的组合,模型可同时描述肌腱的瞬时弹性响应(弹簧主导)和长期粘性流动(阻尼器主导),较两元件模型(如Kelvin-Voigt或Maxwell)更具灵活性。 - 参数物理意义明确
模型参数(如刚度、阻尼系数)可通过实验标定,例如通过拉伸试验拟合应力松弛曲线,确定肌腱的储能模量(k1)和损耗模量(c)。 - 工程适配性强
在仿生机器人(如肌腱驱动连续体机器人)中,三元件模型被用于设计变刚度执行器,通过调节参数实现柔顺驱动与能量回收。
(三)三元件模型的不足
- 非线性特性拟合局限
传统三元件模型基于线性假设,难以精确描述肌腱的应变硬化、胶原纤维重排等非线性行为。例如,高应变下肌腱刚度显著提升,需引入分段函数或分数阶导数扩展模型。 - 参数标定复杂
模型参数较多(如标准线性固体模型含 k1,k2,c),需结合多组实验数据(蠕变+应力松弛)优化,计算成本较高。 - 动态响应误差
在高频载荷下,肌腱的应变率依赖性导致模型预测偏差。例如,跑步时跟腱的高频振动需结合广义三元件模型(多松弛时间)才能准确量化能量耗散。
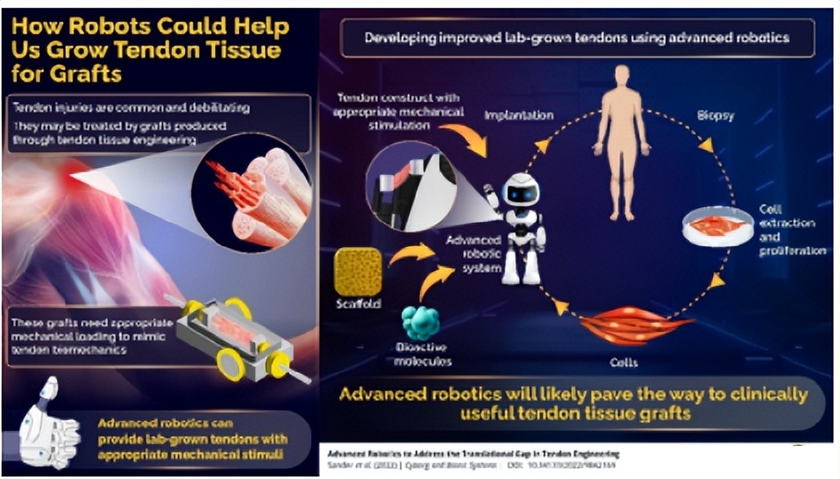
适用于肌腱组织工程的先进机器人技术
(四)改进方向与发展趋势
- 非线性与分数阶扩展
引入分数阶导数模型(如Caputo导数),通过非整数阶微分方程描述肌腱的非均匀粘弹性。例如,中南大学团队通过分数阶模型提升了肌腱共振特性分析的精度。 - 智能材料集成
结合磁流变弹性体或形状记忆合金(SMA),实现参数动态调节。例如,磁场调控的阻尼器(响应时间<10ms)可适配步态切换需求。 - 数据驱动优化
利用强化学习(如DDPG算法)实时优化模型参数。波士顿动力Atlas机器人通过动态调整刚度和阻尼,抑制人机耦合振荡,验证了AI在参数优化中的潜力。 - 跨尺度建模
融合分子动力学(胶原纤维尺度)与连续介质力学(组织尺度),构建多尺度本构关系。例如,3D生物打印的跨物种支架通过微观孔隙结构设计,实现了肌腱-骨界面的力学梯度匹配。
(五)总结
三元件模型为肌腱的粘弹性分析提供了理论框架,但其发展需突破线性与静态假设的限制。未来趋势将聚焦于智能材料集成、多物理场耦合及AI驱动的动态优化,目标是将能量耗散预测精度提升至90%以上,并为仿生机器人、再生医学等领域提供更精准的力学支持。
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。
更多推荐

 14
14 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)