
英博尔控制器全新调速软件:性能优化与智能控制完美融合
英博尔这次在算法上做了不少优化,尤其是在PID控制器的参数调节上,引入了自适应机制。简单来说,就是系统可以根据实时反馈的数据,自动调整PID参数,以达到更好的控制效果。这样做的好处是,可以在不阻塞主线程的情况下,同时处理多个任务,比如数据采集、控制算法计算和界面更新等。最近,英博尔控制器推出了全新的调速软件,这玩意儿一出,简直让搞控制的兄弟们眼前一亮。不过,作为一个喜欢折腾代码的程序员,我更关心的
英博尔控制器调速软件全新
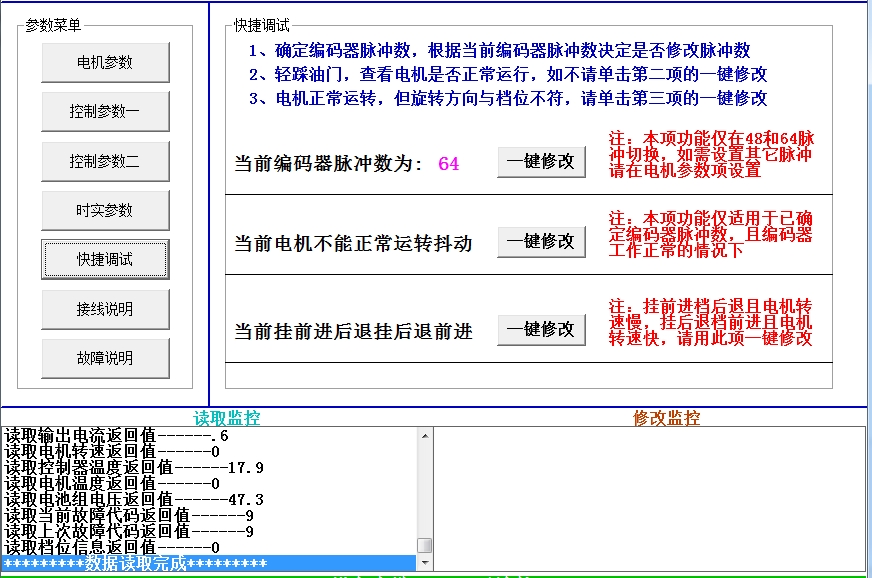
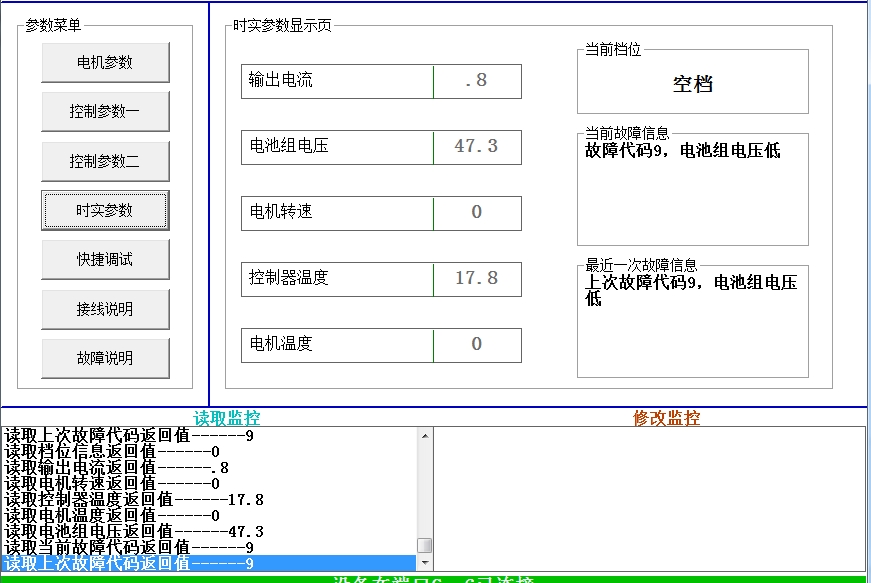
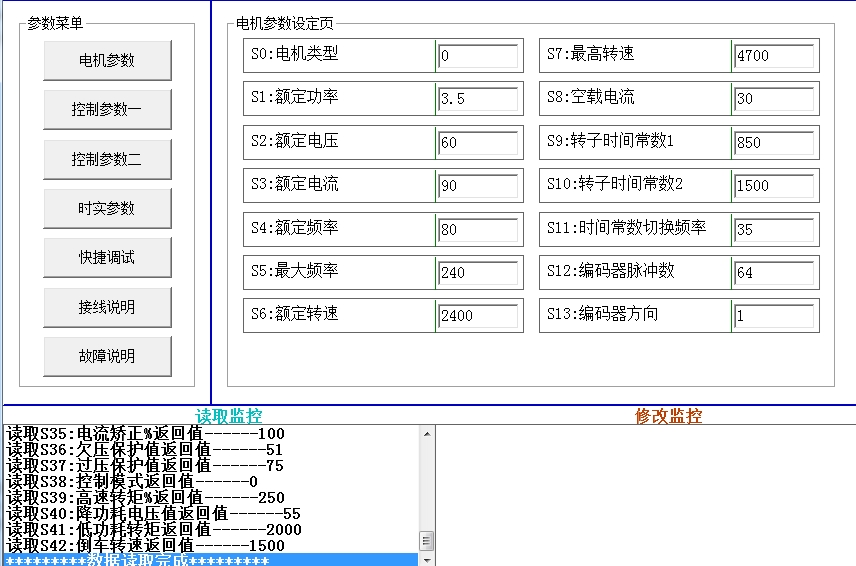
最近,英博尔控制器推出了全新的调速软件,这玩意儿一出,简直让搞控制的兄弟们眼前一亮。先不说别的,光是界面设计就比以前清爽了不少,操作起来也顺手多了。不过,作为一个喜欢折腾代码的程序员,我更关心的是它背后的技术实现。
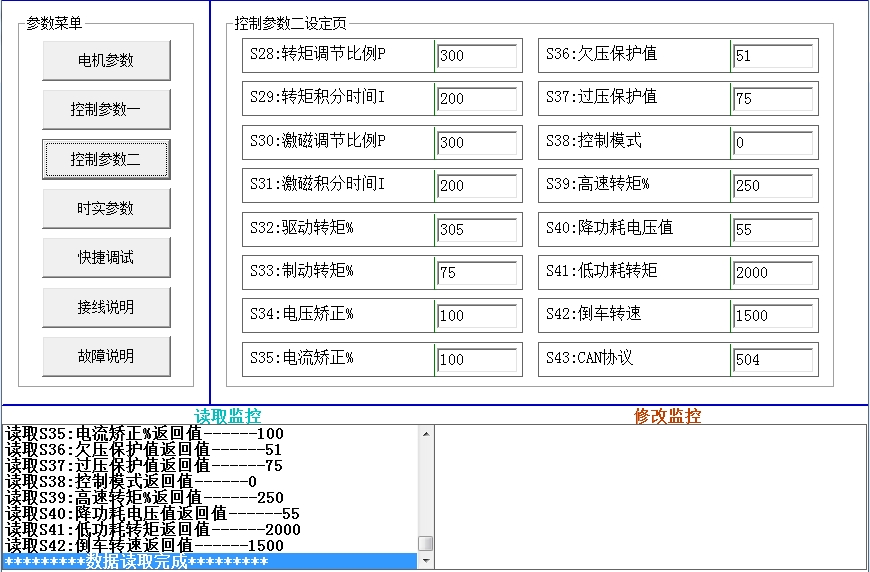
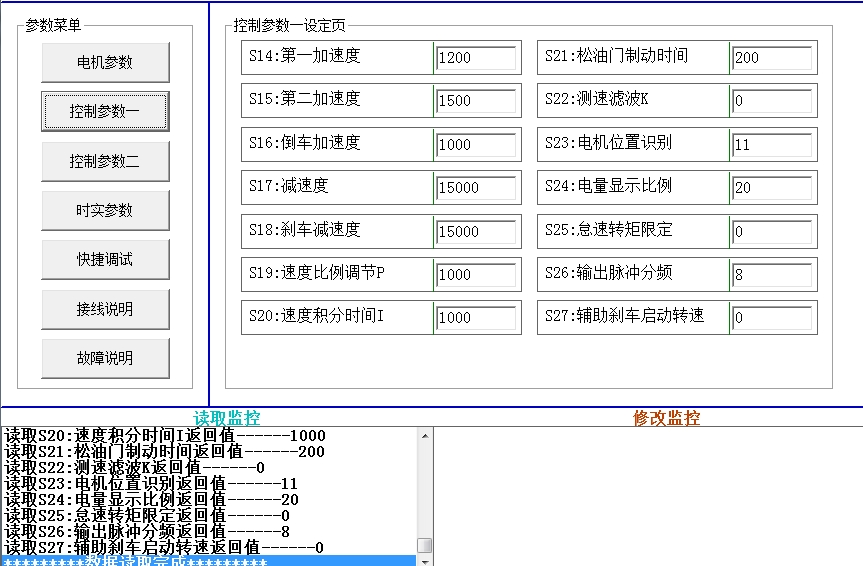
首先,我们来看看这个调速软件的核心算法部分。英博尔这次在算法上做了不少优化,尤其是在PID控制器的参数调节上,引入了自适应机制。简单来说,就是系统可以根据实时反馈的数据,自动调整PID参数,以达到更好的控制效果。下面是一段伪代码,展示了这个自适应PID算法的核心逻辑:
def adaptive_pid(setpoint, current_value):
error = setpoint - current_value
integral += error
derivative = error - last_error
Kp = adjust_Kp(error)
Ki = adjust_Ki(integral)
Kd = adjust_Kd(derivative)
output = Kp * error + Ki * integral + Kd * derivative
last_error = error
return output这段代码的核心思想是通过adjustKp、adjustKi和adjust_Kd这三个函数,根据当前的误差、积分和微分值,动态调整PID参数。这样一来,系统在面对不同的工况时,能够自动优化控制效果,而不需要手动调节参数。
英博尔控制器调速软件全新
接下来,我们再看看软件的多线程处理能力。英博尔这次在软件架构上也做了改进,采用了多线程技术来处理实时数据。这样做的好处是,可以在不阻塞主线程的情况下,同时处理多个任务,比如数据采集、控制算法计算和界面更新等。下面是一个简单的多线程示例:
import threading
def data_acquisition():
while True:
# 模拟数据采集
data = read_sensor_data()
process_data(data)
def control_algorithm():
while True:
# 模拟控制算法计算
output = adaptive_pid(setpoint, current_value)
apply_control(output)
def ui_update():
while True:
# 模拟界面更新
update_ui()
# 创建并启动线程
thread1 = threading.Thread(target=data_acquisition)
thread2 = threading.Thread(target=control_algorithm)
thread3 = threading.Thread(target=ui_update)
thread1.start()
thread2.start()
thread3.start()在这个例子中,dataacquisition、controlalgorithm和ui_update三个函数分别运行在独立的线程中。这样,即使某个任务比较耗时,也不会影响其他任务的执行,从而保证了系统的实时性和响应速度。
最后,不得不提的是英博尔这次在用户体验上的改进。软件的安装和配置过程变得更加简单,甚至支持一键配置。对于新手来说,这无疑降低了上手难度。而对于老手来说,软件提供了丰富的自定义选项,可以根据自己的需求进行深度定制。
总的来说,英博尔这次的调速软件在算法、架构和用户体验上都做了不少优化,值得一试。如果你是一个喜欢折腾代码的控制工程师,不妨下载来玩玩,看看能不能挖出更多有意思的东西。
更多推荐
 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)