
【强化学习】03.DQN
深度 Q 学习(Deep Q - Learning,简称 DQN)是强化学习领域中结合了与的算法。其核心目标在于借助深度神经网络来近似 Q 函数,从而克服传统 Q - Learning 在处理大规模或连续状态空间时所面临的计算难题。DQN 的核心思想是采用深度神经网络(通常为卷积神经网络或者多层感知机)作为函数逼近器,用以估计动作 - 值函数(action - value function),也就
DQN 算法原理与代码
1. 基本原理
深度 Q 学习(Deep Q - Learning,简称 DQN)是强化学习领域中结合了 深度学习 与 Q - Learning 的算法。其核心目标在于借助深度神经网络来近似 Q 函数,从而克服传统 Q - Learning 在处理大规模或连续状态空间时所面临的计算难题。
DQN 的核心思想是采用深度神经网络(通常为卷积神经网络或者多层感知机)作为函数逼近器,用以估计动作 - 值函数(action - value function),也就是 Q 函数。该网络的输入为环境的状态,输出则是每个可能动作的预期奖励。
2. 算法流程
- 初始化网络:初始化 Q 网络和目标 Q 网络。
- 回合循环:对于每一回合进行如下操作:
- 初始化状态:初始化状态 sss。
- 步骤循环:对于每一步进行以下操作:
- 选择动作:依据 ϵ\epsilonϵ-贪婪策略选择动作 aaa。
- 执行动作与观察:执行动作 aaa,观察新的状态 s′s's′ 和奖励 rrr。
- 存储转换:将转换 (s,a,r,s′)(s, a, r, s')(s,a,r,s′) 存储在回放缓冲区中。
- 更新状态:将状态更新为 s′s's′。
- 抽取样本:从回放缓冲区中随机抽取一批转换。
- 计算目标值:使用目标 Q 网络计算目标值。
- 更新 Q 网络:使用梯度下降更新 Q 网络。
- 更新目标 Q 网络:每隔一定步数,使用 Q 网络的权重更新目标 Q 网络。
3. 优缺点
3.1 优点
- 处理复杂状态空间:DQN 通过运用深度神经网络,能够处理高维度和连续的状态空间,极大地拓展了 Q - Learning 的应用范围。
- 稳定训练过程:DQN 采用经验回放(Experience Replay)和固定 Q - 目标(Fixed Q - Targets)技术,有效稳定了训练过程,解决了数据相关性和目标漂移问题。
3.2 缺点
- 超参数敏感:DQN 对超参数的选择极为敏感,例如学习率、回放缓冲区大小、折扣因子等。
- 连续动作处理能力弱:DQN 难以很好地处理连续动作空间的问题,针对此情况,需要使用其他算法,如深度确定性策略梯度(DDPG)。
4. 游戏(CartPole - v1)
CartPole - v1 是 OpenAI Gym 提供的经典强化学习环境。在该环境中,任务是通过向左或向右移动小车来保持直立的杆子不倒下。
4.1 状态空间
CartPole - v1 的状态空间是连续的,由四个实数值组成:
- 小车的位置(Cart Position),范围是 - 4.8 到 4.8。
- 小车的速度(Cart Velocity),范围是 - Inf 到 Inf。
- 杆子的角度(Pole Angle),范围是 - 24 度到 24 度。
- 杆子的角速度(Pole Velocity At Tip),范围是 - Inf 到 Inf。
4.2 动作空间
CartPole - v1 的动作空间是离散的,有两个可能的动作:
- 向左移动小车(Push cart to the left)。
- 向右移动小车(Push cart to the right)。
4.3 奖励
每一步,只要杆子还未倒下,就会获得一个奖励(+1)。若杆子倒下或者小车移出屏幕(小车的位置超过 +/- 2.4),游戏便会结束。
4.4 目标
CartPole - v1 的目标是尽可能长时间保持杆子直立。一般而言,若能在 500 个时间步内保持杆子直立,就可认为解决了该任务。若是 CartPole - v0,只需 200 个时间步。
总体而言,CartPole - v1 是相对简单的环境,但为学习和理解强化学习的基本概念,如状态空间、动作空间、奖励、策略、学习算法等,提供了良好的平台。
5. 训练+测试效果
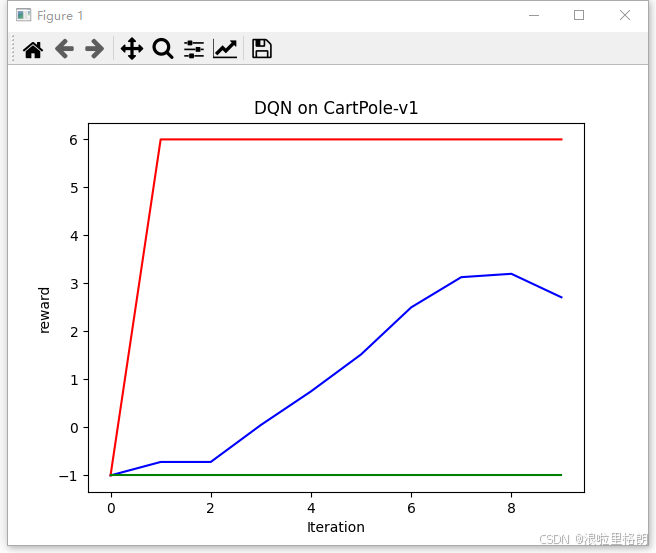
训练:
reward曲线:
success曲线:
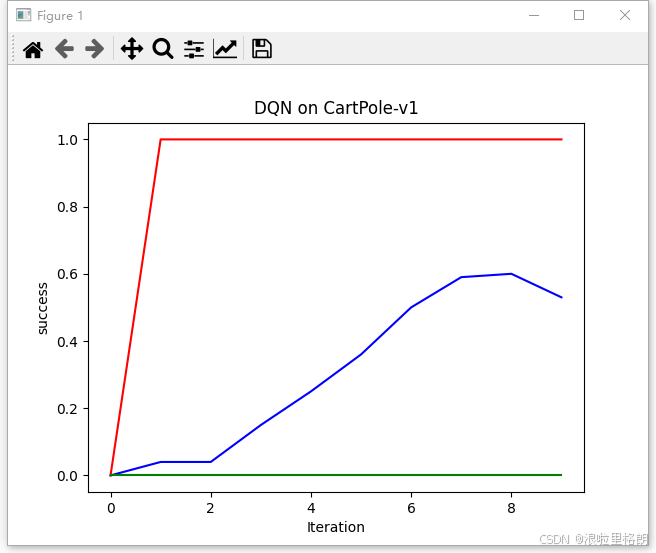
其中,红色绿色为最大值和最小值,蓝色为平均值。
测试:
游戏测试可视化:
6. 代码
以下是使用 PyTorch 实现 DQN 算法解决 CartPole - v1 环境的代码:
config_DQN.py:
import os
import torch
#game_name = 'CartPole-v0'
game_name = 'CartPole-v1'
method_name = 'DQN'
# == buffer
buffer_size = 10000
minimal_size = 500
batch_size = 64
# == model
hidden_dim = 128
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
target_update = 10
epsilon = 0.01
gamma = 0.98
lr = 2e-3
# == iteration
iteration_num = 10 # 迭代次数
episode_num = 100 # 单次迭代的游戏局数
max_step_num = None # 单局的最大步长, None 表示不限制
if game_name == 'CartPole-v0':
max_step_num = 200
elif game_name == 'CartPole-v1':
max_step_num = 500
# == path
dir_data = './data/' + method_name
dir_out = './output/' + method_name + '_' + game_name
dir_models = dir_out + '/models'
dir_figures = dir_out + '/figures'
model_path = dir_out + '/models/lastest.pt'
train_result_path = dir_out + '/train_result.csv'
train_figure_path = dir_out + '/train_figure.png'
test_result_path = dir_out + '/test_result.csv'
if not os.path.exists(dir_models): os.makedirs(dir_models)
if not os.path.exists(dir_figures): os.makedirs(dir_figures)
04_DQN.py:
import os
import time
import random
#import gym
import gymnasium as gym
import numpy as np
import collections
from tqdm import tqdm
import torch
import torch.nn.functional as F
import matplotlib.pyplot as plt
from data.configs.config_DQN import *
class ReplayBuffer:
''' 经验回放池 '''
def __init__(self, capacity):
self.buffer = collections.deque(maxlen=capacity) # 队列,先进先出
def add(self, state, action, reward, next_state, done): # 将数据加入buffer
self.buffer.append((state, action, reward, next_state, done))
def sample(self, batch_size): # 从buffer中采样数据,数量为batch_size
transitions = random.sample(self.buffer, batch_size)
state, action, reward, next_state, done = zip(*transitions)
b_s, b_a, b_r, b_ns, b_d = np.array(state), action, reward, np.array(next_state), done
transition_dict = {
'states': b_s,
'actions': b_a,
'next_states': b_ns,
'rewards': b_r,
'dones': b_d
}
return transition_dict
def size(self): # 目前buffer中数据的数量
return len(self.buffer)
class Qnet(torch.nn.Module):
''' 只有一层隐藏层的Q网络 '''
def __init__(self, state_dim, hidden_dim, action_dim):
super(Qnet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
#print(' ---- x.shape: ', x.shape)
x = F.relu(self.fc1(x)) # 隐藏层使用ReLU激活函数
return self.fc2(x)
class DQN:
''' DQN算法 '''
def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma,
epsilon, target_update, device):
self.state_dim = state_dim
self.hidden_dim = hidden_dim
self.action_dim = action_dim
self.q_net = Qnet(state_dim, hidden_dim,
self.action_dim).to(device) # Q网络
# 目标网络
self.target_q_net = Qnet(state_dim, hidden_dim,
self.action_dim).to(device)
# 使用Adam优化器
self.optimizer = torch.optim.Adam(self.q_net.parameters(),
lr=learning_rate)
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # epsilon-贪婪策略
self.target_update = target_update # 目标网络更新频率
self.count = 0 # 计数器,记录更新次数
self.device = device
def take_action(self, state, is_epsilon = True): # epsilon-贪婪策略采取动作
if is_epsilon and np.random.random() < self.epsilon:
action = np.random.randint(self.action_dim)
else:
state = torch.tensor([state], dtype=torch.float).to(self.device)
action = self.q_net(state).argmax().item()
return action
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device)
actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(self.device)
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1, 1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1, 1).to(self.device)
q_values = self.q_net(states).gather(1, actions) # Q值
# 下个状态的最大Q值
max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)
q_targets = rewards + self.gamma * max_next_q_values * (1 - dones ) # TD误差目标
dqn_loss = torch.mean(F.mse_loss(q_values, q_targets)) # 均方误差损失函数
self.optimizer.zero_grad() # PyTorch中默认梯度会累积,这里需要显式将梯度置为0
dqn_loss.backward() # 反向传播更新参数
self.optimizer.step()
if self.count % self.target_update == 0:
self.target_q_net.load_state_dict(
self.q_net.state_dict()) # 更新目标网络
self.count += 1
def save_model(self, model_path):
torch.save(self.q_net.state_dict(), model_path)
def load_model(self, model_path):
state_dict = torch.load(model_path)
self.q_net.load_state_dict(state_dict, False)
def cal_reward(state, _reward, done, step_num, max_step_num):
reward = _reward
if step_num >= max_step_num-1: reward += reward*5 # 完成最后一步给更多奖励
elif done : reward = -1 # 如果 提前结束, 负分
return reward
def plot_figure(results):
keys = ['reward', 'success']
for k in keys:
iteration_list = list(range(len(results['ave_'+k])))
plt.plot(iteration_list, results['ave_'+k], color='b', label='ave_'+k)
plt.plot(iteration_list, results['max_'+k], color='r', label='max_'+k)
plt.plot(iteration_list, results['min_'+k], color='g', label='min_'+k)
plt.xlabel('Iteration')
plt.ylabel(k)
plt.title('DQN on {}'.format(game_name, k))
plt.show()
figure_path = train_figure_path.replace('.png', '_{}.png'.format(k))
plt.savefig(figure_path)
def train():
# ==== env
env = gym.make(game_name)
# ==== seed
random.seed(0)
np.random.seed(0)
#env.seed(0)
torch.manual_seed(0)
# ==== buffer
replay_buffer = ReplayBuffer(buffer_size)
# ==== agent
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon,
target_update, device)
results = {}
for k in ['reward', 'success']:
results['ave_' + k] = []
results['max_' + k] = []
results['min_' + k] = []
for i in range(iteration_num):
with tqdm(total=episode_num, desc='Iteration %d' % i) as pbar:
rewards, successes = [], []
for i_episode in range(episode_num):
#state = env.reset()
state, _ = env.reset()
for step_num in range(max_step_num):
# ==== action
action = agent.take_action(state)
# ==== step
#next_state, reward, done, _ = env.step(action)
next_state, _reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
# ==== reward
reward = cal_reward(next_state, _reward, done, step_num, max_step_num)
# ==== buffer
replay_buffer.add(state, action, reward, next_state, done)
# ==== 当buffer数据的数量超过一定值后,才进行Q网络训练
if replay_buffer.size() > minimal_size:
transition_dict = replay_buffer.sample(batch_size)
agent.update(transition_dict)
state = next_state
if done : break
success = 0
if step_num >= 499 :
success = 1
successes.append(success)
rewards.append(reward)
ave_reward = np.mean(rewards)
max_reward = max(rewards)
min_reward = min(rewards)
ave_success = np.mean(successes)
max_success = max(successes)
min_success = min(successes)
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({
'episode': '%d' % (episode_num * i + i_episode + 1),
' reward': '%.3f' % ave_reward,
'max_r': max_reward,
'min_r': min_reward,
' success': '%.3f' % ave_success,
'max_s': max_success,
'min_s': min_success,
})
pbar.update(1)
results['ave_reward'].append(ave_reward)
results['max_reward'].append(max_reward)
results['min_reward'].append(min_reward)
results['ave_success'].append(ave_success)
results['max_success'].append(max_success)
results['min_success'].append(min_success)
agent.save_model(model_path)
plot_figure(results)
def test():
env_play = gym.make(game_name, render_mode='human') # UI
state, _ = env_play.reset()
# ==== agent
state_dim = env_play.observation_space.shape[0]
action_dim = env_play.action_space.n
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon,
target_update, device)
agent.load_model(model_path)
time.sleep(10)
step_num = -1
done = False
while not done:
step_num += 1
action = agent.take_action(state, is_epsilon=False)
next_state, reward, terminated, truncated, info = env_play.step(int(action))
done = terminated or truncated
state = next_state
print(' Test ---- step_num, action, reward, obs, done: ', step_num, action, reward, state, done)
time.sleep(0.1)
if __name__ == '__main__':
train()
test()
print:
Iteration 0: 100%|███████████████████████████████████████████████| 100/100 [00:00<00:00, 210.53it/s, episode=100, reward=-1.000, max_r=-1, min_r=-1, success=0.000, max_s=0, min_s=0]
Iteration 1: 100%|█████████████████████████████████████████████████| 100/100 [00:13<00:00, 7.34it/s, episode=200, reward=-0.720, max_r=6, min_r=-1, success=0.040, max_s=1, min_s=0]
Iteration 2: 100%|█████████████████████████████████████████████████| 100/100 [00:24<00:00, 4.02it/s, episode=300, reward=-0.720, max_r=6, min_r=-1, success=0.040, max_s=1, min_s=0]
Iteration 3: 100%|██████████████████████████████████████████████████| 100/100 [00:27<00:00, 3.62it/s, episode=400, reward=0.050, max_r=6, min_r=-1, success=0.150, max_s=1, min_s=0]
Iteration 4: 100%|██████████████████████████████████████████████████| 100/100 [00:28<00:00, 3.50it/s, episode=500, reward=0.750, max_r=6, min_r=-1, success=0.250, max_s=1, min_s=0]
Iteration 5: 100%|██████████████████████████████████████████████████| 100/100 [00:22<00:00, 4.39it/s, episode=600, reward=1.520, max_r=6, min_r=-1, success=0.360, max_s=1, min_s=0]
Iteration 6: 100%|██████████████████████████████████████████████████| 100/100 [00:28<00:00, 3.55it/s, episode=700, reward=2.500, max_r=6, min_r=-1, success=0.500, max_s=1, min_s=0]
Iteration 7: 100%|██████████████████████████████████████████████████| 100/100 [00:29<00:00, 3.39it/s, episode=800, reward=3.130, max_r=6, min_r=-1, success=0.590, max_s=1, min_s=0]
Iteration 8: 100%|██████████████████████████████████████████████████| 100/100 [00:32<00:00, 3.09it/s, episode=900, reward=3.200, max_r=6, min_r=-1, success=0.600, max_s=1, min_s=0]
Iteration 9: 100%|█████████████████████████████████████████████████| 100/100 [00:41<00:00, 2.44it/s, episode=1000, reward=2.710, max_r=6, min_r=-1, success=0.530, max_s=1, min_s=0]
qt.svg: Cannot read file 'D:/Installed/Miniconda3/lib/site-packages/matplotlib/mpl-data/images/matplotlib.svg', because: Encountered incorrectly encoded content. (line 1)
qt.svg: Cannot read file 'D:/Installed/Miniconda3/lib/site-packages/matplotlib/mpl-data/images/matplotlib.svg', because: Encountered incorrectly encoded content. (line 1)
qt.svg: Cannot read file 'D:/Installed/Miniconda3/lib/site-packages/matplotlib/mpl-data/images/matplotlib.svg', because: Encountered incorrectly encoded content. (line 1)
qt.svg: Cannot read file 'D:/Installed/Miniconda3/lib/site-packages/matplotlib/mpl-data/images/matplotlib.svg', because: Encountered incorrectly encoded content. (line 1)
qt.svg: Cannot read file 'D:/Installed/Miniconda3/lib/site-packages/matplotlib/mpl-data/images/matplotlib.svg', because: Encountered incorrectly encoded content. (line 1)
qt.svg: Cannot read file 'D:/Installed/Miniconda3/lib/site-packages/matplotlib/mpl-data/images/matplotlib.svg', because: Encountered incorrectly encoded content. (line 1)
Test ---- step_num, action, reward, obs, done: 0 1 1.0 [ 0.00341437 0.15488905 0.00846848 -0.28279167] False
Test ---- step_num, action, reward, obs, done: 1 1 1.0 [ 0.00651216 0.3498892 0.00281265 -0.5727917 ] False
Test ---- step_num, action, reward, obs, done: 2 1 1.0 [ 0.01350994 0.5449716 -0.00864319 -0.86458725] False
Test ---- step_num, action, reward, obs, done: 3 1 1.0 [ 0.02440937 0.7402101 -0.02593493 -1.1599752 ] False
Test ---- step_num, action, reward, obs, done: 4 0 1.0 [ 0.03921358 0.5454355 -0.04913443 -0.8755355 ] False
...
Test ---- step_num, action, reward, obs, done: 495 0 1.0 [-0.96470857 -0.04944998 0.00179182 0.21341997] False
Test ---- step_num, action, reward, obs, done: 496 1 1.0 [-0.9656976 0.1456463 0.00606022 -0.0786972 ] False
Test ---- step_num, action, reward, obs, done: 497 1 1.0 [-0.96278465 0.34068087 0.00448627 -0.36946195] False
Test ---- step_num, action, reward, obs, done: 498 0 1.0 [-0.95597106 0.14549546 -0.00290297 -0.07536785] False
Test ---- step_num, action, reward, obs, done: 499 0 1.0 [-0.9530611 -0.04958476 -0.00441032 0.21639778] True
reference
[1] https://github.com/boyu-ai/Hands-on-RL
更多推荐
 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)